

Video Friday ist Ihre wöchentliche Auswahl an tollen Robotik-Videos, die Ihre Freunde auf gesammelt haben IEEE-Spektrum die Robotik. Wir veröffentlichen außerdem einen wöchentlichen Kalender mit bevorstehenden Robotikveranstaltungen für die nächsten Monate. Bitte senden Sie uns Ihre Veranstaltungen zur Aufnahme zu.
Eurobot Open 2024: 8.–11. Mai 2024, LA ROCHE-SUR-YON, FRANKREICH
ICRA 2024: 13.–17. Mai 2024, YOKOHAMA, JAPAN
RoboCup 2024: 17.–22. Juli 2024, EINDHOVEN, NIEDERLANDE
Cybathlon 2024: 25.-27. Oktober 2024, ZÜRICH
Viel Spaß mit den heutigen Videos!
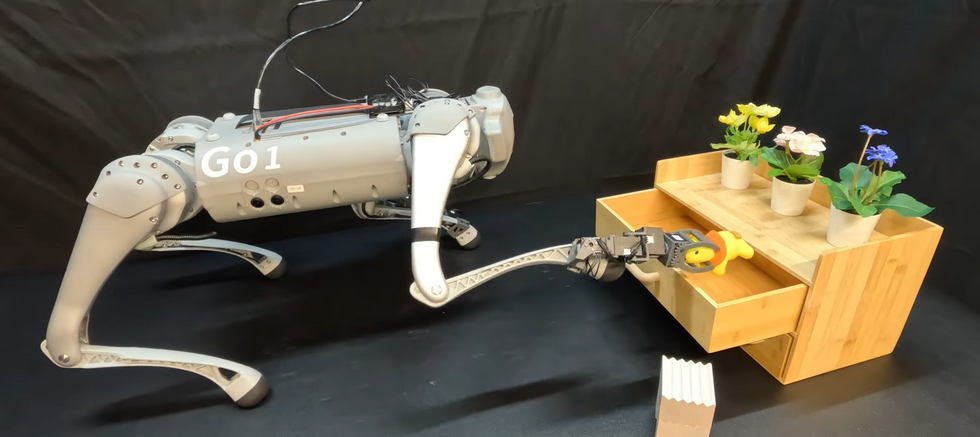
In dieser Arbeit stellen wir LocoMan vor, einen geschickten vierbeinigen Roboter mit einer neuartigen Morphologie, der vielseitige Manipulationen in verschiedenen eingeschränkten Umgebungen durchführen kann. Durch die Ausstattung eines Unitree Go1-Roboters mit zwei leichten, kostengünstigen modularen 3-DoF-Lokomanipulatoren an den Vorderbeinen nutzt LocoMan die kombinierte Beweglichkeit und Funktionalität von Beinen und Zangen für komplexe Manipulationsaufgaben, die eine präzise 6D-Positionierung des Roboters erfordern. in einem großen Arbeitsraum.
[ CMU ]
Danke, Changyi!
Die Objektmanipulation wurde umfassend im Zusammenhang mit Manipulatoren mit fester Basis und beweglichen Manipulatoren untersucht. Allerdings ermöglicht die überaktuierte Fortbewegungsmodalität, die von Schlangenrobotern eingesetzt wird, eine einzigartige Mischung aus Objektmanipulation durch Fortbewegung, die als Lokomanipulation bezeichnet wird. In diesem Artikel stellen wir einen Optimierungsansatz zur Lösung des Lokmanipulationsproblems vor, der auf der Planung impliziter und nicht impulsiver Kontaktpfade für unseren Schlangenroboter COBRA basiert.
[ Silicon Synapse Lab ]
Okay, aber wo dieser Anzug Augen hat, ist nicht dort, wo Spot Augen hat, also kann Spot im Anzug nicht sehen, oder? Und jetzt bin ich skeptisch, was die Echtheit des gegenseitigen Schnüffelns angeht.
[ Boston Dynamics ]
Hier ist ein Video der Roboter von Field AI, die in relativ komplexen, unstrukturierten Umgebungen ohne vorherige Karten arbeiten. Lesen Sie unbedingt unseren Artikel diese Woche für weitere Details!
[ Field AI ]
Liegt das nur an mir, oder ist es ein bisschen verrückt, dass Forscher jetzt Artikel veröffentlichen, in denen sie ihren humanoiden Controller mit dem humanoiden Controller des „Herstellers“ vergleichen? Es ist, als wären Humanoide jetzt eine Ware oder so etwas.
[ OSU ]
Auch ich packe Rüstungen für CIFAR.
[ Pollen Robotics ]
Honey Badger 4.0 ist unsere neueste Roboterplattform, die speziell für die Durchquerung lebensfeindlicher Umgebungen und schwieriges Gelände entwickelt wurde. Ausgestattet mit mehreren Kameras und Sensoren stellt es sicher, dass bei der Inspektion keine Mängel übersehen werden.
[ MAB Robotics ]
Danke, Jakub!
Haben Sie eine Automatisierungsaufgabe, die die Präzision und das Drehmoment eines Industrieroboterarms erfordert, aber etwas Robusteres oder in einem unkonventionellen Formfaktor benötigen? Entdecken Sie den Aktuator der H-Serie von HEBI Robotics! Mit dem 9-fachen Drehmoment unserer X-Serie und nahtloser Kompatibilität mit dem HEBI-Ökosystem für die Roboterentwicklung eröffnet die H-Serie eine neue Welt voller Möglichkeiten für Roboter.
[ HEBI ]
Danke, Dave!
So kommt es auch bei mir zu Hause zu allen Verschüttungen: super passiv-aggressiv.
[ 1X ]
Das EPFL-Team unter der Leitung des Doktoranden Milad Shafiee hat zusammen mit den Co-Autoren Guillaume Bellegarda und Auke Ijspeert, Direktor des BioRobotics Lab, einem vierbeinigen Roboter mithilfe von Deep Reinforcement Learning die Navigation in schwierigem Gelände beigebracht und damit einen wichtigen Schritt in der Robotik gemacht Biologie.
[ EPFL ]
Bei Agility stellen wir Roboter her, die für die Arbeit konzipiert sind. Unser Digit-Roboter arbeitet mit uns in Räumen, die für Menschen konzipiert sind. Digit erledigt mühsame, sich wiederholende Aufgaben, die für eine Maschine vorgesehen sind, und ermöglicht Unternehmen und ihren Mitarbeitern, sich auf Arbeiten zu konzentrieren, die den menschlichen Faktor erfordern.
[ Agility ]
Mit einer Vielzahl unglaublicher Zahlen und Highlights ist hier der ABB-Robotik-Veteran Jan Jonsson, der sein Wissen und seine Leidenschaft für einige unserer Roboter und Steuerungen aus der Vergangenheit teilt.
[ ABB ]
[ Electric Sheep ]
Der AI Index verfolgt, aggregiert, destilliert und visualisiert Daten im Zusammenhang mit künstlicher Intelligenz. Der Index stellt politischen Entscheidungsträgern, Forschern, Journalisten, Führungskräften und der breiten Öffentlichkeit unvoreingenommene, streng überprüfte Daten aus globalen Quellen zur Verfügung, um ein tieferes Verständnis des komplexen Bereichs der KI zu entwickeln. Unter der Leitung eines Lenkungsausschusses einflussreicher KI-Vordenker ist der Index der weltweit umfassendste Bericht über KI-Trends. In diesem Seminar präsentiert HAI-Forschungsdirektor Nestor Maslej Highlights aus dem Bericht 2024 und erläutert Trends in Bezug auf Forschung und Entwicklung, technische Leistung, technische Ethik der KI, Wirtschaft, Bildung, Politik und Governance, Vielfalt und öffentliche Meinung.
[ Stanford HAI ]
Das CMU RI-Seminar dieser Woche wird von Dieter Fox von NVIDIA und UW zum Thema „Wo ist RobotGPT?“ moderiert.
In diesem Vortrag werde ich Ansätze zur Generierung großer Datensätze diskutieren, um Robotermanipulationsfähigkeiten zu trainieren, wobei der Schwerpunkt auf der Rolle liegt, die Simulation in diesem Zusammenhang spielen kann. Ich werde einige unserer früheren Arbeiten zeigen, in denen wir einen robusten Transfer der in der Simulation trainierten Manipulationsfähigkeiten von der Simulation in die Realität demonstriert haben, und dann einen Weg zur Generierung groß angelegter Demonstrationssätze vorstellen, die dabei helfen könnten, robuste und offene Roboterhandhabungsmodelle zu trainieren.
[ CMU ]