
Aufgrund ihrer Stärke und Geschwindigkeit sind Roboterarme aus Stabilitätsgründen normalerweise dauerhaft an Böden oder anderen Strukturen befestigt, was ihre Reichweite einschränkt. Ziel der im Labor für Lernalgorithmen und -systeme (LASA) der EPFL durchgeführten Forschung war die Entwicklung einer bimodalen Roboterhand mit erweiterten Greiffähigkeiten, einschließlich gelegentlicher Unabhängigkeit vom Roboterarm, an den sie gefesselt ist.
Roboterhände werden im Allgemeinen mit einem Ziel entwickelt: dem Festhalten von Gegenständen. Um eines zu entwickeln, das dies tun und selbstständig kriechen kann, wie das Ding aus der Addams-Familie, haben Forscher mithilfe eines genetischen Algorithmus (der auf biologischen Tricks wie natürlicher Selektion und Evolution beruht) und dem MuJoCo-Physiksimulator ein grundlegendes Design erstellt und verfeinert zu testen. die Praktikabilität von Iterationen.
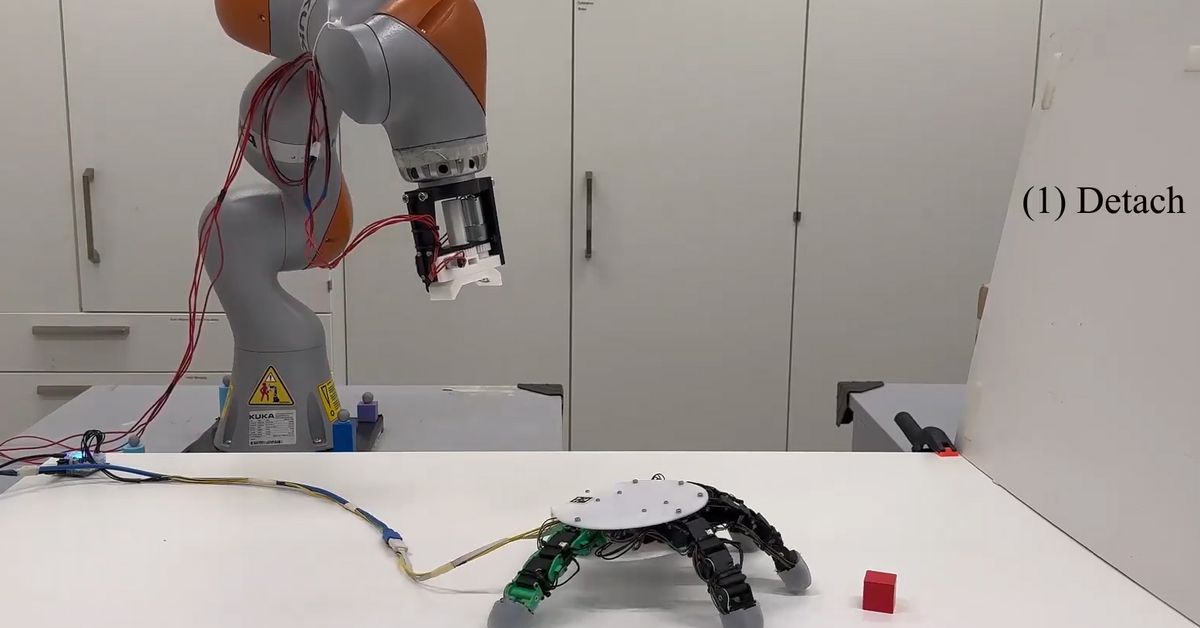
Der Algorithmus und die Simulationen halfen den Forschern, die optimale Position und Anzahl der benötigten beweglichen Finger zu bestimmen, die sich als fünf herausstellten, in einer Anordnung ähnlich der menschlichen Hände. Die Roboterhand verfügt außerdem über eine magnetische Verbindung am Handgelenk, sodass sie sich autonom an einem Arm befestigen und von diesem lösen kann.
Die Finger der Hand können in beide Richtungen gebogen werden, sodass einige von ihnen zum Heben von Gegenständen verwendet werden können, während die anderen als winzige Beine fungieren. Dieses Design erweitert auch den Nutzen der Hand, wenn sie an einem Roboterarm befestigt ist. Es kann mehrere Gegenstände gleichzeitig anheben, ohne den Arm zu drehen, um nicht verwendete Finger neu zu positionieren.
Die Hand ist auch deutlich kleiner als die von Robotern wie Spot von Boston Dynamics, die sich auf vier Beinen frei bewegen können. Spot wurde bereits mit einem eigenen Roboterarm und Greifer aufgerüstet, aber mit einer beweglichen Hand, die unabhängig arbeitet, ist er möglicherweise besser gerüstet, um Bereiche zu erkunden oder zu analysieren, in die Spot sich nicht hineinquetschen kann.