

Letzten Monat kündigte das in Oslo ansässige Unternehmen 1X (ehemals Halodi Robotics) eine massive Serie-B-Investition in Höhe von 100 Millionen US-Dollar an, und es ist klar, dass sie alle Hebel in Bewegung gesetzt haben. Ein neues Video, das letzte Woche veröffentlicht wurde, zeigt a [insert collective noun for humanoid robots here] von Android EVE-ähnlichen mobilen Manipulatoren, die eine Vielzahl von Aufgaben ausführen, indem sie durchgängige neuronale Netze (von Pixeln bis hin zu Aktionen) nutzen. Und noch besser: Das Video scheint mehr oder weniger ehrlich zu sein: eine einzige Aufnahme, mit (angemessener) einfacher Geschwindigkeit und voller Akkulaufzeit. Aber wir hatten noch Fragen! Und 1X hat Antworten.
Wenn Sie, wie ich, nach dem Ansehen dieses Videos einige sehr wichtige Fragen hatten, darunter, ob diese Pflanze tatsächlich tot ist und was das Schicksal des beschwerten Begleitwürfels ist, möchten Sie diese Fragen und Antworten mit lesen Eric JangVizepräsident für künstliche Intelligenz bei 1X.
Wie viele Takes waren nötig, um diesen Take zu bekommen?
Eric Jang: Ungefähr 10 Aufnahmen, die über eine Minute dauerten; Dies war das erste Mal, dass wir ein Video dieser Art drehten. Es ging also eher darum, zu lernen, wie man das Filmteam koordiniert und den Dreh so vorbereitet, dass er beeindruckend aussieht.
Haben Sie Ihre Roboter speziell für Floppy-Objekte und transparente Objekte trainiert?
Jan: NEIN! Wir trainieren unser neuronales Netzwerk, um alle Arten von Objekten zu erfassen, sowohl starre als auch verformbare und transparente. Da wir die Manipulation durchgängig anhand von Pixeln trainieren, ist die Erfassung verformbarer und transparenter Objekte viel einfacher als bei einer typischen Greifpipeline, bei der Sie die genaue Geometrie dessen bestimmen müssen, was Sie greifen möchten.
Was hindert Ihre Roboter daran, diese Aufgaben schneller auszuführen?
Jan: Unsere Roboter lernen durch Demonstrationen, sodass sie genau mit der gleichen Geschwindigkeit arbeiten, wie menschliche Teleoperatoren die Aufgabe vorführen. Wenn wir Demonstrationen zusammenstellen würden, bei denen wir uns schneller bewegen, würden die Roboter das auch tun.
Wie viele beschwerte Begleitwürfel wurden bei der Erstellung dieses Videos beschädigt?
Jan: Bei 1X haben gewichtete Begleitwürfel keine Rechte.
Dies ist eine sehr interessante Lademethode, aber sie scheint viel komplizierter zu sein als eine Art Schnittstelle direkt mit der Basis. Warum stattdessen auf Manipulation zurückgreifen?
Jan: Sie haben Recht, es ist nicht der einfachste Weg, den Roboter aufzuladen, aber wenn wir unserer Mission, allgemein leistungsfähige und zuverlässige Roboter zu bauen, die in der Lage sind, alle Arten von Objekten zu manipulieren, erfolgreich sein wollen, müssen unsere neuronalen Netze zumindest dazu in der Lage sein Aufgabe. Darüber hinaus werden die Kosten erheblich gesenkt und das System vereinfacht!
Welches Tier soll dieses blaue Stofftier sein?
Jan: Es ist ein fetter Hai, denke ich.
Wie viele verschiedene Roboter gibt es in diesem Video?
Jan: 17? Und vieles mehr, was stationär ist.
Wie unterscheidet man Roboter?
Jan: Auf der Basis sind kleine Zahlen aufgedruckt.
Ist diese Pflanze tot?
Jan: Ja, wir haben es dort platziert, weil kein CGI/3D-gerendertes Video die Mühe machen würde, eine tote Pflanze hinzuzufügen.
Was für eine existenzielle Krise durchlebt der Roboter im Fenster?
Jan: Es war soll sein Öffnen und schließen Sie das Fenster wiederholt (gut zum Testen der statistischen Signifikanz).
Wenn einer der Roboter tatsächlich ein Mensch wäre, der einen Helm und einen Anzug trägt und eine Zange hält und auf einer mobilen Basis steht, könnte ich das dann sagen?
Jan: Dieser Kommentar zum Youtube-Video hat mich sehr geschmeichelt:
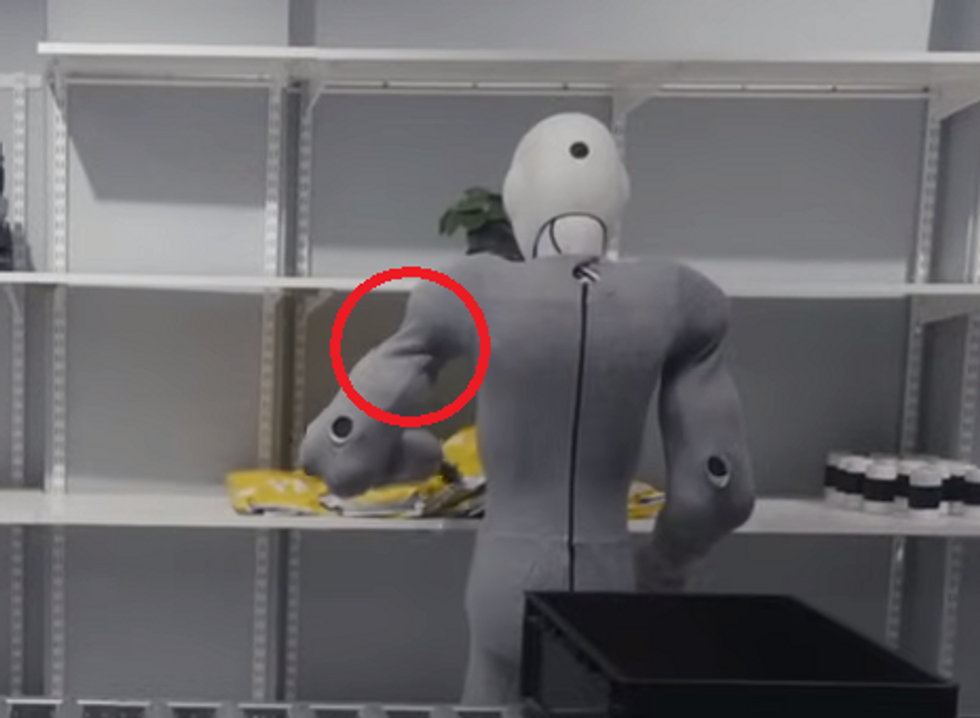
Schaut man sich aber den Bereich an, in dem sich der Oberarm zur Schulter hin verjüngt, ist er zu dünn, als dass ein Mensch mit so breiten Schultern hineinpassen könnte:
Warum sind Ihre Roboter immer so glücklich? Planen Sie, komplexere HRI-Vorgänge (Mensch-Roboter-Interaktion) mit ihren Gesichtern durchzuführen?
Jan: Ja, komplexere HRI-Projekte sind in Vorbereitung!
Sind Ihre Roboter in der Lage, autonom miteinander zu kollaborieren?
Jan: Bleiben Sie dran!
Ist das asymmetrische Tetromino am schwierigsten? Tetromino für Robotermanipulation?
Jan: Guter Fang! Ja, das Grüne ist das Schlimmste von allen, weil es viele gute Möglichkeiten gibt, es mit der Zange einzuklemmen und anzuheben. Wenn es beim robotergestützten Lernen mehrere Möglichkeiten gibt, etwas abzurufen, kann dies tatsächlich das Modell des maschinellen Lernens stören. Ein bisschen so, als würde man ein Auto bitten, gleichzeitig nach links und rechts abzubiegen, um einem Baum auszuweichen.
Die Roboter anderer Leute kochen Kaffee. Können Ihre Roboter Kaffee kochen?
Jan: Ja! Wir wollten in diesem Video Kaffee als Osterei hinzufügen, aber die Kaffeemaschine ging kurz vor Drehbeginn kaputt und es stellte sich heraus, dass man eine Keurig K-Slim nicht per Lieferung am nächsten Tag nach Norwegen bekommen kann.
1X stellt derzeit sowohl KI-Forscher (zu den Spezialgebieten gehören Imitation Learning, Reinforcement Learning und groß angelegte Schulungen) als auch Android-Operatoren (!) ein, was tatsächlich nach einem superspaßigen und interessanten Job klingt. Mehr hier.
Aus den Artikeln auf Ihrer Website
Verwandte Artikel im Internet